玩转树莓派
现在来看一下最后一个部件——机架。机架的选择也有很多方案,我们还是推荐初始学者使用一款性价比高的机架:

这款机架的材料是碳纤维,轴距是310mm。也就是对角线上安装的两个电机距离为310mm。我们的电机安装上6045的桨叶之后距离刚刚好。这也是我们选择这款机架的原因。
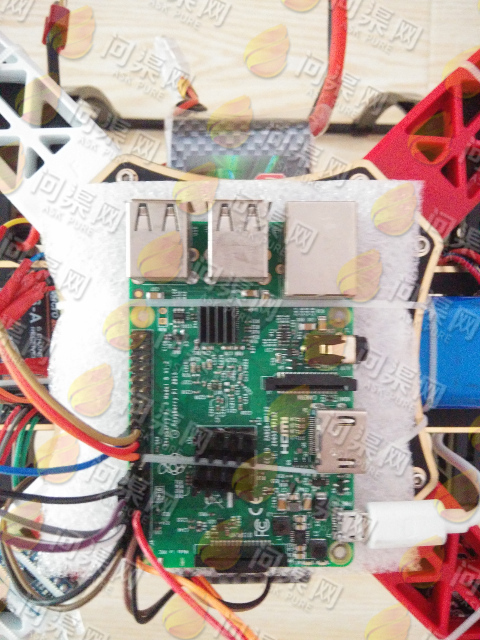
电机、电调的接线部分在前面的内容中已经讲述完了,现在我们需要把4个2206电机和4个20A电调安装到机架上,并用尼龙扎带将电调、电池、树莓派扎紧,这里就不再赘述了。只要你仔细一些,并有一点动手能力,就肯定能安装成功。注意,先不要安装桨叶。
安装完成之后将4个电调的信号线插入树莓派的GPIO接口上,将摇控器的接收机信号线也插入树莓派的GPIO接口上,还有MPU-6050陀螺仪也接入树莓派的GPIO上。
最后,你可以从你家里的路由器上接一跟网线到树莓派上,然后进行远程调试。打开Makefile文件修改电机的引脚编号:
#4个电机的GPIO引脚
PORT_MOTOR0 = (27)
PORT_MOTOR1 = (26)
PORT_MOTOR2 = (28)
PORT_MOTOR3 = (25)
你可以自己写一个程序通过对GPIO上4个电调信号引脚的控制来让电机转动起来,也可以使用我们所提供的源代码(源代码在最后提供),编译之后运行:
cd release/bin/
su -c 'quadcopter --test 15 100 3000'

这条命令的意思是为wiringPi上的15号引脚电机测试,电机转数100,测试3000毫秒(3秒)。我们来对这个命令说一下简单的说明:
quadcopter是我们编译完成后生成的可执行文件,也就是我们的树莓派上的飞行控制程序。它有两个运行模式“飞行模式”/“电机测试模式”。在你执行这个程序时参数“--fly”为“飞行模式”;参数“--test”为“电机测试模式”。
quadcopter --test 电机测试模式
[GPIO] 为wiringPi的引脚编号
[SPEED] 为电机运行速度0 ~ 1000
[MSECS] 测试时长(单位:毫秒,最多测试10000毫秒)
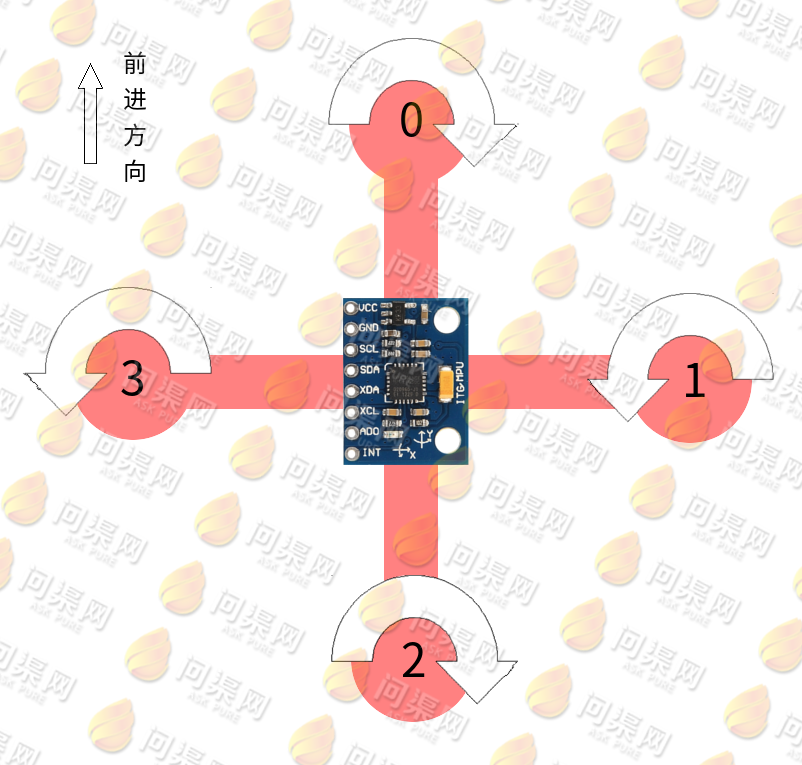
先来测试一下你的4个电机是否都可以正常的运转起来,我们对电机做一下编号0,1,2,3。你的4个电机转动方向应该是这样的:
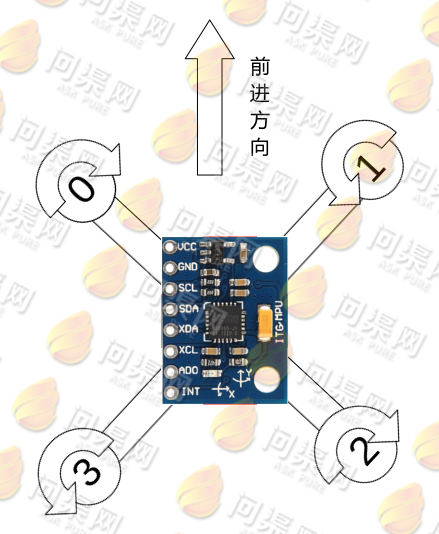
根据你自己的需要可以选择这两种安装方式,并在Makefile中修改FLY_MODE = _FLY_MODE_X_ 配置选项:
#X型 _FLY_MODE_X_
#I型 _FLY_MODE_I_
FLY_MODE = _FLY_MODE_X_
如果你发现某一个电机的转动方向不正确,你只需要把电机与电调连接的3个电源线的任意2根反接即可。
由于电机在转动的过程中会对轴产生反扭力,通俗的讲就是电机在转动时,转子与定子之间的作用力与反作用力会使底座向转子的反方向转动,如果你的4个电机都是朝一个方向转动,那么你的四轴在起飞之后也会快速自旋。为了消除反扭力,我们需要像上图那样让电机0和电机1的转动方向相反,让电机2和电机3的转动方向相反,同时,电机1和电机2也相反,电机3和电机0也相反。这样4个轴的反扭力就会相互抵消。但是在四轴实际飞行时,反扭加不会完全被消除,你的四轴仍然会有一些自旋,但是你不用担心,我们会马上就要讲述四轴的平衡原理,并解决自旋的问题。
整个飞机的配置都写在Makefile文件中,如果你还不了解这些配置也不用过于担心,我们在后续章节中会详细讲解整个飞控程序的配置与代码。注意:我们的这个系列的教程是希望大家能从四轴飞行原理和控制程序原理上有所了解,并掌握每一个细节,只有这样大家才能真正的将属于你自己的飞机飞上天。所以,我们的飞控程序做的很简单,配置也很不灵活,但我们会从原理上给大家讲述清楚。因此,请大家千万不要想买了硬件,下载了软件之后就可以飞行了。一定要认真学习飞行原理与软硬件程序功能,只有这样你才会有所收获,否则与买一个商业飞控没有任何区别。而我们制作无人机的宗旨也是为了学习与分享。
Copyright © 2015-2023 问渠网 辽ICP备15013245号