玩转树莓派
现在我们来介绍一下关于树莓派四旋翼无人机的硬件组成。当然这些内容都是针对一些初学者的,如果你对四轴无人机已经轻车熟路可以根据自己的需要配置相应的硬件。这时的所有清单都是推荐的,你可以自己更换成适合自己的内容。
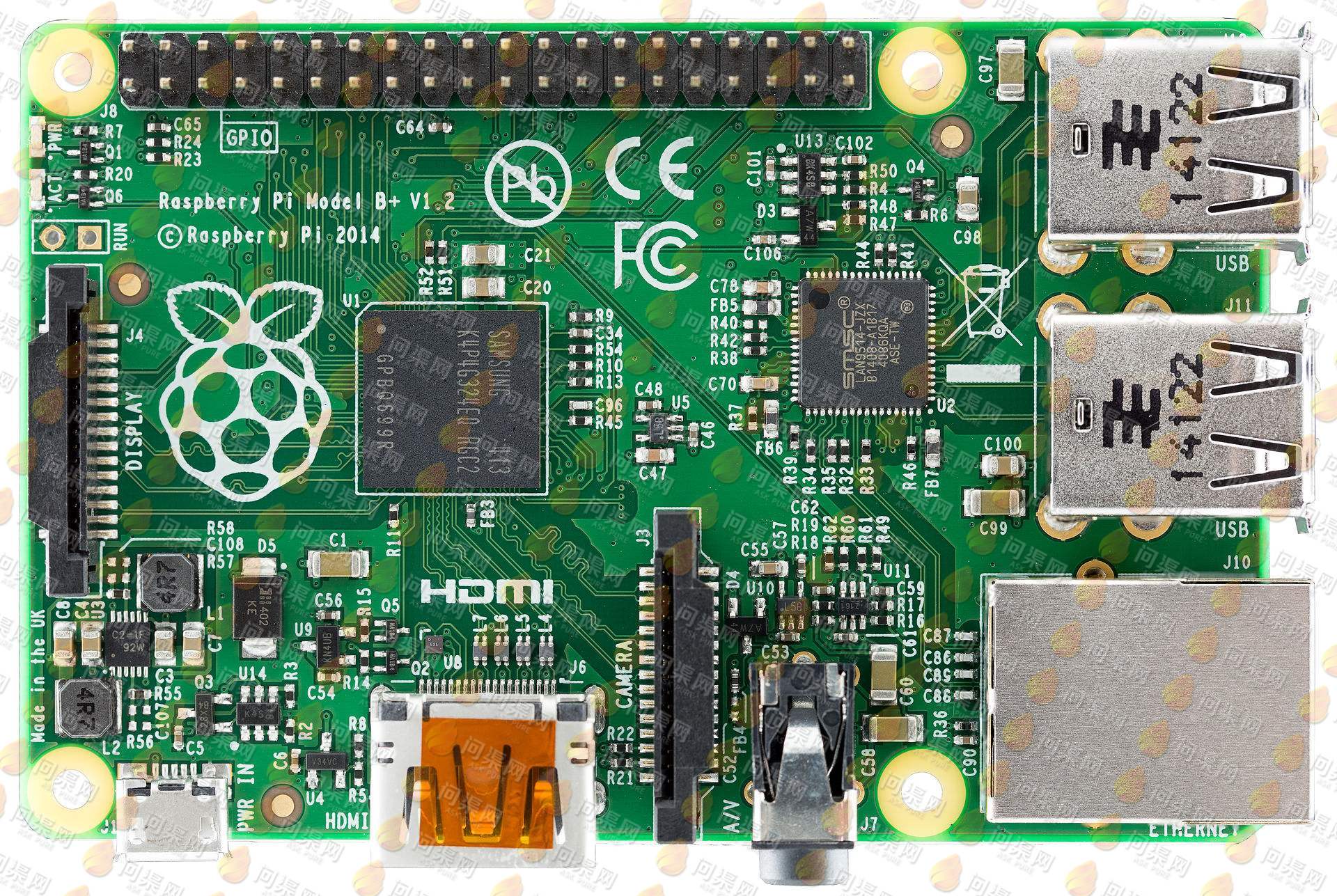
一、飞控单元:树莓派3B × 1
树莓派做为作者最喜欢的智能机器人大脑载体,在我们这个系列中做无人机是最重要的一个部件。树莓派做为一台卡版式电脑已经被广大创客所接纳并发挥出其巨大的优势。树莓派的体积小,只有一张银行卡片大小,性能高,1.2GHz 四核 Broadcom BCM2837 64 位 ARMv8 处理器,1GB内存。最主要的是树莓派上是可以安装Linux操作系统的,这对于我们编写应用程序就提供了非常大的便利条件。在我们这个无人机制作系列中,我们同样采用树莓派来做为飞行控制器。当然很多朋友觉得树莓派运行的是Linux操作系统,担心其实时性问题。不过请大家放心,树莓派的实时性的确没有实时性强的单片机高,在使用树莓派生成PWM信号时会有一点延时,但经过作者的实测,无人机飞行的还比较稳定。
二、存储卡:4G以上的microsd卡 × 1
对于树莓派来,它只是一个卡片式电脑,它虽然有很多计算机部件,但没有外部存储器,也就是我们通常所说的硬盘。树莓派所使用的“硬盘”是一张可插拔的sd卡,从树莓派官方网站上下载下来的系统可以直接烧写在sd卡上,将sd卡插入树莓派就可以做为树莓派的启动系统并为其提供外部存储空间,我们飞控程序和其它文件都可以存放在这张sd卡上。

三、机架:F310碳纤维机架 × 1
机架是整个飞机的载体,我们几乎会把所有的部件都安装在这个机架上。最早作者是采用了F450的机架,这是一个轴距450mm的机架(轴距就是安装在对角线上两个电机位置的距离),不但体积大,而且比较重,所以后来就采用了轴距为310mm的机架。我们不建议采用更小轴距的机架,因为轴距越小,电机之间的距离也就越小,螺旋桨的尺寸就越小,相对来说拉力也就越小。而对于我们是采用树莓派做飞控,树莓派要比那些单片机的重量重一些,如果飞机太小,拉力不够则很难起飞。我们选择的这种机架材料是碳纤维的,比较坚硬,而且很轻,非常适合做四轴。

四、电机:无刷电机2206-1900KV × 4
航模电机有很多种型号,最大的类别就是有刷电机和无刷电机。电机型号我们推荐使用2206无刷电机,这4个数中的22表示其直径为22mm,06表示其定子高度为6mm,1900KV表示电机的动力等级,它表示电机输入电压每增加1伏特,电机空转增加的转速值。电机绕线匝数多,KV值低,最高输出电流小,但扭力大;电机绕线匝数少,KV值高,最高输出电流大,但扭力小 。你可以想像一下汽车的档位,档位越低(比如1档),发动机的动力越大,但速度越小;档位越高(比如5档),发动机的动力越小,但速度越快。关于有刷电机和无刷电机的区别和具体的介绍我们会专门单讲,这里大家只需要简单了解我们需要4个无刷电机即可(如果你买的电机是区分正反牙的,请准备2个正2个负)

六、电调:20A无刷电调 × 4
电调也同样分为有刷电调和无刷电调。在这里我们还是使用无刷电调。电调的全称为电压调节器,我们的电机需要使用电调来对其做速度的调整,以便让飞机平稳飞行,并做出相应的飞行姿态。我们需要使用电调接到电机上,并通过电调上的信号输入控制电调对电机的电压,从而达到电机转速的控制。这部分也是飞行能够飞行的前提,对于初学者不用担心,在后续章节中我们会逐步学习如何使用树莓派来控制电调和电机,让其转动的更快或更慢。我们需要的电调通常要支持3S锂电池,最大放电电流达到20A以上。

五、螺旋桨:6045正反桨 × 4
我们使用的电机也要区分是顺时针转(正转)还是逆时针转(反转),因对四轴的对称性,我们可以通过电机的反扭力使无机达到平衡,所以要求在对角线上的电机转动方向是相同的,相邻位置的电机转动方向是相反的。否则飞机将出现自旋。螺旋桨型号中的6045这4个数字中的60表示桨的直径是6英寸的,45表示其螺距为45mm。对于螺旋桨来说在相同转速的条件下,螺距越大,气流对其产生的反作用力就越大,所以飞机上升的动力也就越大;螺距越小,气流对其产生的反作用力就越小,所以飞机上升的动力也就越小。

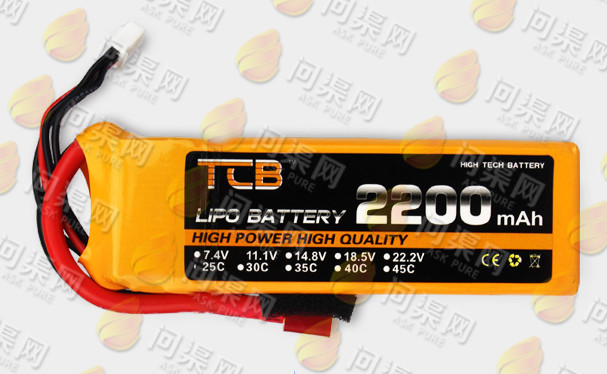
六、航模电池:锂电池3S 20C 2200MAH × 1
我们使用3节锂电池为四轴供电,也有使用更多节的比如4节、6节、8节或更多。电源中有几节锂电池,我们就称这样的电源为几S。例如3S表示有3节锂电池,4S有4节锂电池等等。每一节锂电池的电压为3.7v,3S的电压就是11.1v;4S的电压就是14.8;6S的电压就是22.2v。这样的锂电池电源,我们也通常称作“航模电池”。另外,对于航模电池还有两个重要的参数:电量和放电倍率。电量就是我们所常用的2200MAH、3000MAH、5300MAH或10000MAH等等。它表示了电源能够存储的电能的多少。而放电倍率通常是有15C、20C、25C或30C等等。它的意思是说放电的速率。然而不是电池容量越大就越适合四轴,电池的容量大,重量也就大,四轴飞行时的承重也就大,需要的负载也就大。如果你的电池非常重,那四轴能不能飞起来都是个问题,所以还是选择一款适合的航模电池。当然有了电池之后你还需要一个匹配的电池充电器。
七、遥控器:2.4G四通道遥控器 × 1 + 接收机 × 1
你如果对摇控器有一定了解的话可能听说过“日本手”和“美国手”这两种不同的摇控器。其实它们并没有什么本质差别。假设我们的四轴已经可以成功的飞行,我们需要摇控器上的一个控制杆可以控制四个电机的整体转数,也就是人们常说的“油门”。当然,油门这个词用在四轴上可能不太贴切,它的作用就是控制电机转数,可快,可慢,而所谓的“日本手”摇控器是油门在右侧,“美国手”摇控器的油门则在左侧。购买遥控器我们需要一对遥控器和接收器,由遥控器发出我们的遥控信号,并由接收机读取其信号并发送给树莓派。树莓派读取遥控器的信号并做出相应的姿态动作。关于遥控器发送和接收的原理我们不作讨论,我们会在后续章节中学习如何使用树莓派来读取遥控器的信号。

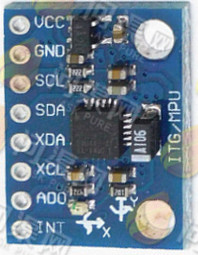
八、陀螺仪:MPU6050电子陀螺仪
简单来说,我们为了让飞机在飞行中能够保持平衡,就需要时刻检测到飞机当前的姿态,然后根据当前的姿态对飞机进行平衡补偿。如果没有状态检测,飞机将无法保持平衡,坠机也就在所难免了。MPU6050陀螺仪是一款性价比较高的电子陀螺仪。它可以通过加速计、陀螺仪得到XYZ三轴的加速度和角速度,这将就可以根据需要计算出当前的角度,然后再根据相应的算法对四个电机做平衡补偿,从而使飞机持续平稳飞行。
九:电源模块
我们采用航模电池来为电机供电,航模锂电池的电压通常是3.7的倍数,7.4v、11.2v等等。而树莓派供电则需要5v的电压。如果再单独为树莓派提供一个独立电源的话就太麻烦了,我们采用另外一种方案,使用DC-DC降压模块,我们可以根据需要将11.2v电压降压到5v为树莓派供电。

十:其它耗材若干
尼龙扎带、杜邦线、航模电调电源线14awg、电烙铁、焊锡、焊锡膏或松香、绝缘胶带、螺丝刀、热熔胶枪等等。
Copyright © 2015-2023 问渠网 辽ICP备15013245号