玩转树莓派
本文作者:李德强
第一节 目标与准备工作
今天我们来一起制作一个两轮自平衡小车。提起自平衡小车显然它的核心内容就在于“平衡”,我们今天的首要目标就是制作一个两轮的小型玩具车,它有一个很大的特点,能够自动维持其平衡状态。当然由于设备条件和精力有限,我们这里所说的“平衡”是相对的,并不是绝对的平衡。先来看看最终效果:
虽然还没有完美的平衡,但至少它已经“站起来”了。如果你有足够的耐心,对它做精确的平衡参数控制可以使其趋于“完美的平衡”。我们抛开对于平衡的完美追求,把主要精力放在自平衡的原理上,具体看看它是如何实现的。
我们首先从整体来看看制作一个自平衡小车都需要哪些工作:
1、购置硬件设备。
2、实现小车电机驱动和陀螺仪驱动。
3、完成软件程序,通过PID(比例、积分、微分控制)实现小车的自平衡算法。
先来看看我们的自平衡小车都需要哪些硬件设备:
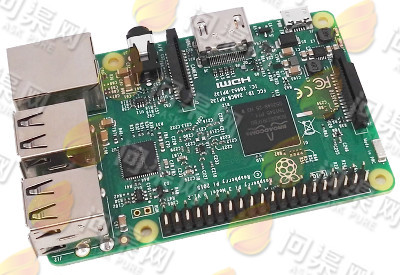
树莓派3+B x 1

小车底架 x 1(内含直流电机 x 2 、车轮 x 2。
PS:这款小车前后是带有万向轮的,安装时不安装万向轮,用程序来控制小车的平衡。)

LM7805三端稳压器 x 1(2节锂电池为树莓派供电时稳压用)
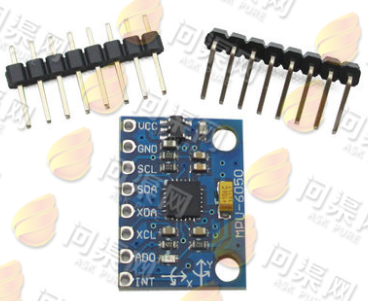
MPU6050陀螺仪 x 1

直流有刷电调 x 1(注意,小车是有刷电机,所以是有刷电调)

330R电阻 x 1

EL817光耦隔离器 x 1

2节18650锂电池盒 x 2(为树莓派和电机独力供电)

杜邦线若干(公对公、公对母、母对母)
#1楼
阿宽
于 2016年12月08日12:02:30 发表
你好,请问这个直流有刷电调能不能换成L298N。感觉功能应该差不多。电调的支持功率能大一些。还有什么其他的区别吗?
#2楼
李德强
于 2016年12月08日12:45:36 发表
感谢您支持问渠网!我们还是推荐用电调。L298N的准确度和响应速度都不及电调,如果用L298N也是可以的,但效果可能并不好。
#3楼
李青
于 2018年12月17日15:23:56 发表
你好,两节18650可以同时为电机和树霉派供电吗?
#4楼
李德强
于 2018年12月19日16:05:56 发表
可以,但是推荐加入稳压模块,两节18650串联就是2S 7.4V,已经超过树莓派额定电压5V
Copyright © 2015-2023 问渠网 辽ICP备15013245号