玩转树莓派
本文作者:李德强
第一节 目标与准备工作
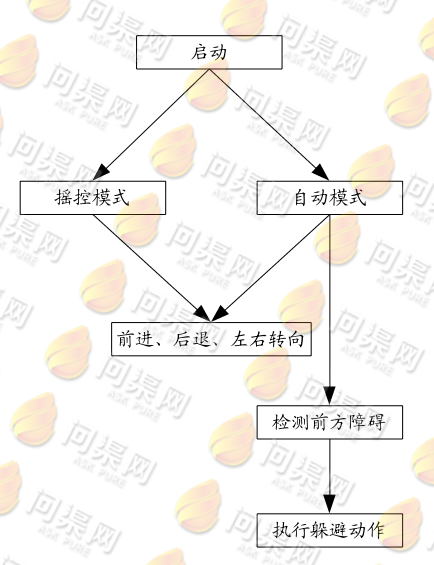
今天我们要利用树莓派来做一个小型的玩具车。说起小车,首要的功能就是可以前进、后退、左右转向。当然这是远远不够的,我们还希望小车能够按着我们预期的要求来行驶,也就是说小车可以接受我们的命令,并按命令来做出相应的动作——遥控。于是我们要做一个能够通过手机来遥控小车的程序。另外,我们还希望小车能够自主的行驶,自己做出前方障碍物距离判断,并自主的做出躲避动作。也就是说小车应该有那么一点点的“智能”。这里的“智能”两个字很初级、很原始,并不代表现代科技上所说的“智能”。我们首先来看一下小车所具备的基本功能。
有了小车整体的功能说明,我们的思路就很清晰了。我们的工作内容如下:
1、组装小车硬件设备。
2、为小车编写服务程序,用于接收用户命令。
3、编写手机程序,用于向小车发送命令。
我们先来看一下今天要组装小车的硬件清单:
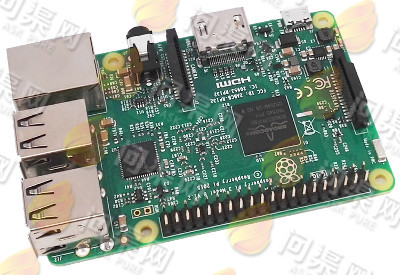
树莓派3+B x 1

小车底架 x 1(内含直流电机 x 4 、车轮 x 4)
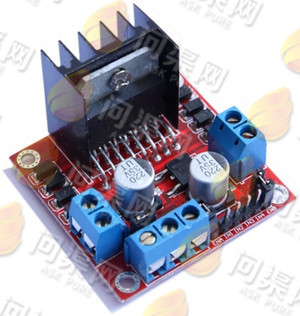
L298N直流电机驱动 x 1(此型号芯片只能驱动2个直流电机)

HC-SR04 超声波测距芯片 x 1

LM7805三端稳压器 x 1(2节锂电池为树莓派供电时稳压用)

4节18650锂电池盒 x 1

杜邦线若干(公对公、公对母、母对母)
#1楼
匿名
于 2016年11月23日22:33:38 发表
我最近也在做自动避障小车,不过我用的是arduino 玩的。
Copyright © 2015-2023 问渠网 辽ICP备15013245号