玩转树莓派
本文作者:李德强
第八节 电子陀螺仪
接下来我们再来看一个关键性的芯片MPU-6050,这是一个陀螺仪,可以感知3维空间里x、y、z三个维度测量加速度和3轴旋转速度。对于3维加速度我们目前还用不到,当然,如果你要对四轴做自稳算法时就需要用到它了。我们只对3轴的旋转角速度做处理。我们知道对旋转角速度的积分即时角度(当然这时所说的积分是狭义上的定积分)。
我们再来看一下MPU6050与树莓派的接线方式:
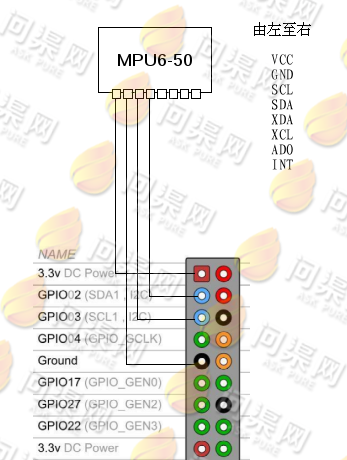
1) 陀螺仪VCC接树莓派3.3V DC Power
2) 陀螺仪GND接树莓派Ground
3) 陀螺仪SCL树莓派SCL
4) 陀螺仪SDA树莓派SDA
接线完成后,启动树莓派,MPU6050会有红灯亮起。另外还要对树莓派的系统做一些设置:
1)修改/boot/config.txt文件,去掉下面3行的注释
dtparam=i2c_arm=on dtparam=i2s=on dtparam=spi=on
2) 修改/etc/modules文件,追加以下内容
i2c-bcm2708 i2c-dev

3) 修改/etc/modprobe.d/raspi-blacklist.conf将下面两行内容删除或用#注释掉
修改前: blacklist spi-bcm2708 blacklist i2c-bcm2708 修改后: #blacklist spi-bcm2708 #blacklist i2c-bcm2708
4) 安装i2c-tools工具
sudo apt-get install i2c-tools libi2c-dev
5) 重启树莓派:
sudo reboot -n
之后使用以下命令查看设备是否正常:
sudo i2cdetect -y 1 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- --
可以看到在0x68上有一个设备,就是MPU6050陀螺仪。同时可以使用以下命令看看/dev/下是否有i2c设备:
ls /dev i2c-1
我们使用树莓派的MPU6050开源驱动,可以直接取得旋转角:
https://github.com/richardghirst/PiBits.git
此驱动是用C++编写的,下载后编译运行即可。
[-0.11001 -0.29976 -0.013939]
[-0.11001 -0.29976 -0.013939]
[-0.11001 -0.29976 -0.013939]
[-0.10981 -0.30104 -0.014503]
[-0.10981 -0.30104 -0.014503]
[-0.10981 -0.30104 -0.014503]
[-0.10961 -0.30205 -0.015050]
[-0.10961 -0.30217 -0.015057]
[-0.10961 -0.30217 -0.015057]
[-0.10951 -0.30295 -0.015734]
#1楼
匿名
于 2016年11月22日04:37:26 发表
这个PiBits.git,如果pi的版本比较高,i2c-1,原文说需要改一个参数。将*.sh中的i2c-0改为i2c-1,以及在I2Cdev.cpp中所有的i2c-0改为i2c-1
#2楼
匿名
于 2016年11月22日09:40:36 发表
感谢您的支持!飞控程序中已经将i2c设备文件修改为一个宏定义,位置在mods/mpu6050/i2cdev.h中的第6行#define I2C_DEV"/dev/i2c-1"中定义。如需修改,请按实际 的文件名来修改此处定义,修改后需要重新编译程序。
#3楼
匿名
于 2017年07月05日22:04:22 发表
请问作者,这个程序怎么编译运行啊,就是过程。
#4楼
李德强
于 2017年07月06日06:33:57 发表
首先下载源代码git clone https://github.com/richardghirst/PiBits.git然后进入到MPU6050-Pi-Demo中,执行make即可注意:我提到的编译环境和运行环境均为Linux操作系统
#5楼
jack
于 2017年12月17日18:07:15 发表
6050的采样频率是多少?
#6楼
No39
于 2017年12月17日19:42:20 发表
您好,我在树莓派上编译MPU6050-Pi-Demo时出错,显示g++ -DDMP_FIFO_RATE=9 -Wall -g -O2 `pkg-config gtkmm-3.0 --cflags --libs` -c -o main_3d.o main_3d.cppPackage gtkmm-3.0 was not found in the pkg-config search path.Perhaps you should add the directory containing `gtkmm-3.0.pc'to the PKG_CONFIG_PATH environment variableNo package 'gtkmm-3.0' foundIn file included from main_3d.cpp:19:0:demo_3d.h:22:31: fatal error: gtkmm/drawingarea.h: No such file or directory #include ^compilation terminated.: recipe for target 'main_3d.o' failedmake: *** [main_3d.o] Error 1
#6楼
匿名
于 2017年12月17日19:42:20 发表
支持问渠网
#7楼
李德强
于 2017年12月18日09:36:05 发表
缺少依赖包,在树莓派上执行sudo apt-get install libgtk-3-dev
#8楼
No39
于 2017年12月19日21:02:00 发表
您好,安装libgtk-3-dev时依赖项不能依赖起,存在broken packages,在网上搜到是包依赖的一些依赖项需要降级,但降级怎么也解决不了。请问您当时是怎么安装的?还是在电脑端LINUX编译MPU6050-Pi-Demo比较好?
#9楼
No39
于 2017年12月19日23:00:15 发表
对不起是我粗心大意了,在更换下载源后libgtk-3-dev安装成功,不过缺少的应该是libgtkmm-3.0,执行sudo apt-get install libgtkmm-3.0后以管理员身份make就能编译成功了。
#10楼
李德强
于 2017年12月20日09:43:27 发表
MPU6050的频率是100hz
#11楼
123
于 2018年05月16日19:27:54 发表
怎么运行了?
#12楼
匿名
于 2018年09月16日19:07:16 发表
支持问渠网
#13楼
gui3315
于 2018年09月16日19:09:24 发表
树莓派2B运行 陀螺仪读取模块 报错 FIFO overflow!飞行模式也报错 FIFO overflow!求解? 急用,急用,急用
#14楼
李德强
于 2018年09月26日12:00:41 发表
可能是元件问题,我之前也有这问题,换一个就可以了
Copyright © 2015-2023 问渠网 辽ICP备15013245号