玩转树莓派
今天我们来一起学习一下关于PID反馈控制的相关知识。PID反馈控制产生的时间很久,它已经成为了工业控制中非常常用,而且非常成熟的控制方法。所谓PID反馈控制,就是“比例”、“积分”、“微分”返馈控制方法,我们先来简单介绍的一下PID都是什么,它们分别在反馈控制中起到什么样的作用。
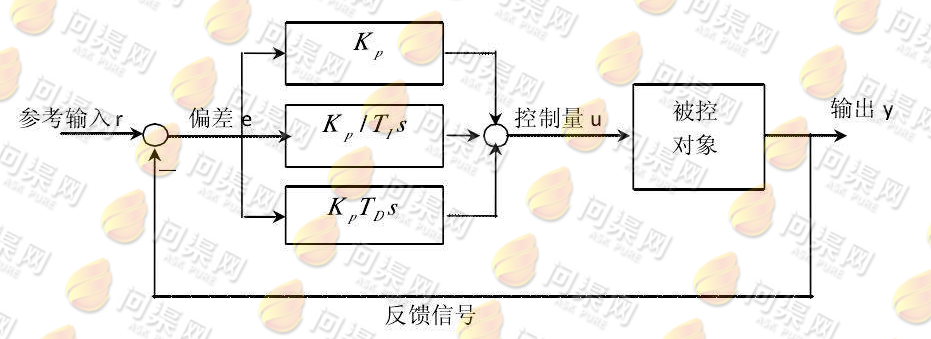
在通常的控制中往往无法通过一次性的控制使系统达到稳定,例如我们在做四轴无人机时,在考虑系统平衡控制时需要对其做反馈控制,当无人机出现水平不平衡时,我们希望通过对左右两个电机的不同转数的控制,使无人机保持平衡,但究竟应该使左右两个电机的转数是多少才会使飞机恢复平衡呢?我们从直观的感觉来分析,通常是这样:
当飞机左倾时,我们希望左侧电机转的更快,右侧电机转的更慢,从而使飞机恢复平衡;而当飞机右倾时,我们希望左侧电机转的更慢,而右侧电机转的更快,从而使飞机恢复平衡。而我们对电机转数的控制,来源于当前飞机所倾斜的角度,我们希望,飞机倾斜角度的越大,而对电机转数的补偿越大;飞机倾斜的角度越小,对电机的转数补偿越小。这就是我们通常所说的比例控制。
一、比例(Proportion)
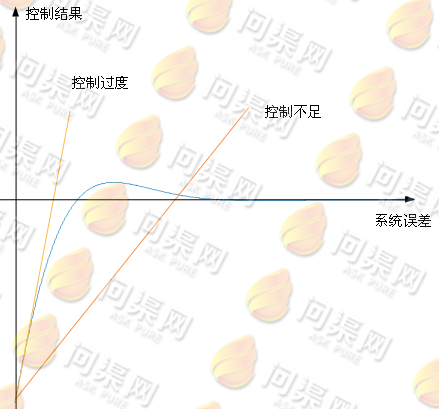
就是一个线性系数,它表示根据当前系统的误差(飞机倾斜的角度)做比例(误差乘以比例系数),从而得到对系统的控制结果(电机转数)。这是一个线性系统,也就是说系统误差越大,控制结果就越大,系统误差小,控制结果就越小。
然而,只使用比例参数来根据系统误差做控制是不够的,因为在实际当中绝大数的系统不是线性的,想要达到系统的稳定,只通过比例控制无法使系统达到平衡,例如:
对于比例控制结果值计算:
p_result = Deviation * P;
我们可以看到,如果P参数过大,就会导致系统的过度控制,使系统还没有达到平衡就出现发散,而如果P参数过小,则系统很难达到平衡。于是我们就想到在比例控制的基础上再加上另外一种控制,就是积分。
二、积分(Integral)
积分系数是根据当前系统的误差做累计和,使得系统在比例控制不足的情况下,快速消除系统的稳态误差。例如,我们假设P的值为2.0,也就是说当飞机出现倾斜时,倾斜角为10度时,我们给左右电机的补偿各为20和-20(单位为转/秒,举例值,不是真实值),而当电机加入了这个补偿值之后,由于左侧电机转的比右侧电机快,所以飞机左侧逐渐上升,右侧逐渐下降,此时倾斜角恢复到了6度,于是给电机的补偿则是12和-12,飞机恢复平衡的速度变慢,逐渐恢复到2度,此时对电机的补偿值是4和-4,但此时电机对系统恢复平衡的作用就比较小,由于非线性关系和系统负载不平衡等等因素,飞机只靠比例就无法消除这个稳态误差,所以我们就需要引入积分(I)系数,来根据系统当前误差,累计对电机做补偿,每次对电机做补偿时,都需要加入积分的这个累加和:
i_result += Deviation * I;
三、微分(Differential)
最后我们再来看看关于D参数,它的表示微分控制系统,表示控制值对系统恢复稳态的快慢,它的计算方式是当前误差减去上一次控制的误差,然后将这个结果乘以系数D,得到微分的控制值。
d_result = (Deviation - pre_Deviation) * D;
微分控制项可以消除系统由于恢复平衡时速度过快的问题,可以很好的对控制系统产生一个阻尼效果,使系统可以根据P和I快速恢复平衡,而通过D使系统不会出现发散。
在PID控制中我们调参的过程也比较复杂,通常也是根据经验慢慢调试,关于参数的调节和定值,可以参考下面的方法进行调试。
口诀一:
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢。微分时间应加长;
理想曲线两个波,前高后低4比1;
一看二调多分析,调节质量不会低。
口诀二:
参数整定寻最佳,从大到小顺次查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大弯,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
理想曲线两个波,调节过程高质量。
关于PID反馈控制还有很多知识需要学习,我们将在下一节中一起学习关于串级双环PID反馈控制。
Copyright © 2015-2023 问渠网 辽ICP备15013245号