自制小四轴
在上一节我们完成了单片机基本功能电路的设计,但这还不够,接下来,我们根据需要来完成小四轴所需要的传感器电路和其它的一些辅助电路的设计工作。
首先,我们需要使用的传感器是MPU6050,这是一款6轴传感器包括3个轴的陀螺仪和3个轴的加速度计。我们会在后续内容中讲述如何编写程序来使用它,在本节中,我们只需要完成它的外围电路设计即可。我们可以在MPU6050的数据手册中找到其官方推荐的应用电路。我们根据其推荐应用电路来完成我们自己的电路设计,如下图所示:
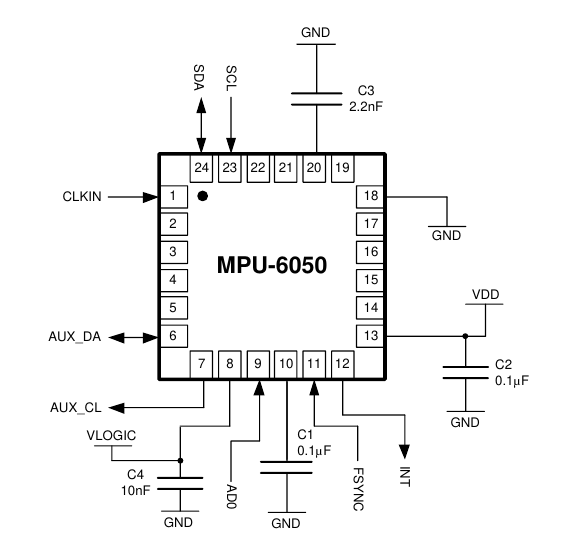
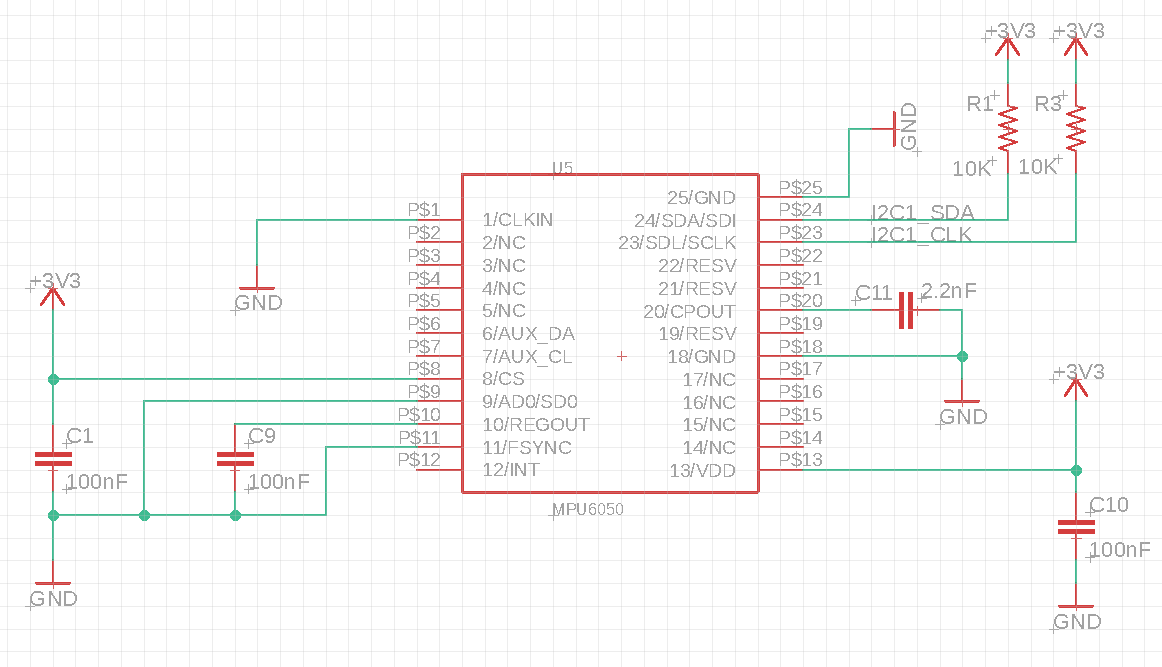
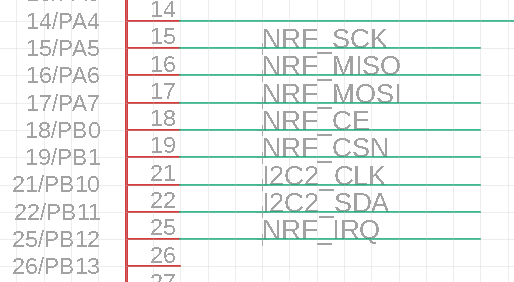
在这里,我们使用的是MPU6050的I2C接口,我们在I2C的SDA和CLK两个数据线上放置了两个10K的上拉电阻,以便上它们在非传输数据的时候保持高电平。MPU6050的I2C接口接入我们STM32单片机的I2C1接口中,如下图所示:

其次,我们还需要使用一个无线通信模块NRF24L01,它与我们的单片机使用SPI1接口,完成与遥控器的通信功能。电路设计如下图所示:

同样的,关于NRF24L01的程序部分我们会在后续内容里讲述。
除此之外,我们还需要使用单片机的TIM来完成4路PWM的信号输出,以便通过MOS管来控制电动机的转动速度,我们采用单片机中TIM2的4路PWM输出来完成此功能,如下图所示:
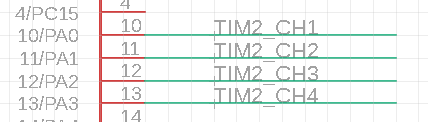
这TIM2的CH1、CH2、CH3、CH4四路PWM信号输出到电机驱动电路中的MOS当中,使得电动机根据PWM信号的脉宽调整其相应的转动速度,我们在电机驱动一节已经讲过了,不再赘述。
接下来,我们还需要完成一个UART1串口的输入输出功能、按钮功能、LED灯功能,做为我们调试用,如下图所示:
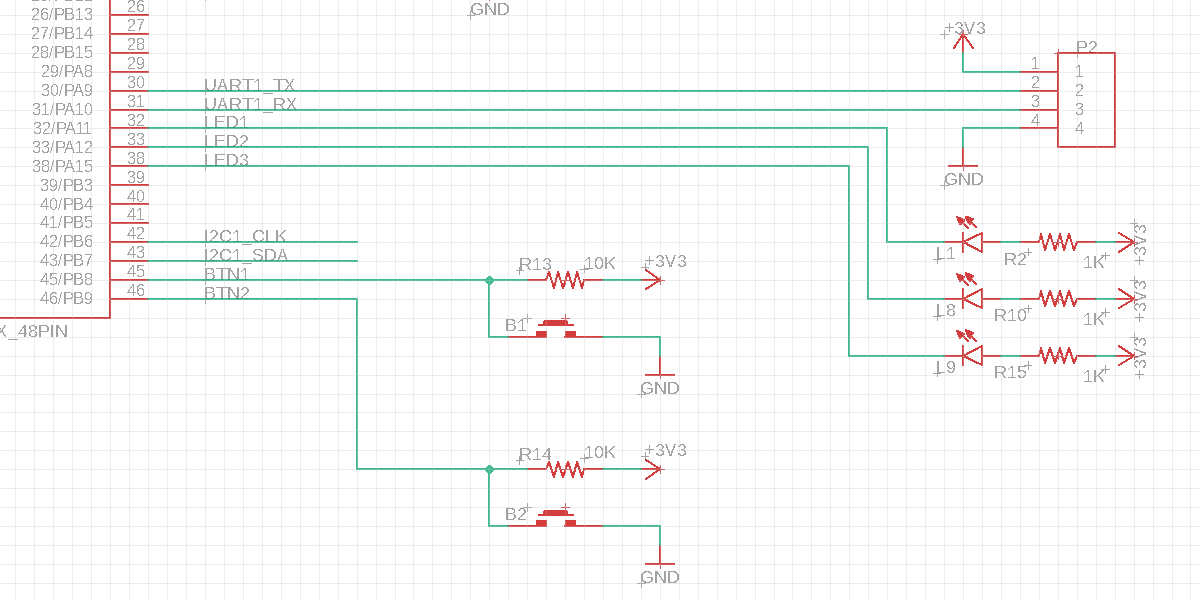
其中,串口输入输出使用的是单片机的UART1,即30/PA9和31/PA10脚。两个按钮使用的是45/PB8和46/PB9脚,三个LED灯使用的是32/PA11、33/PA12、38/PA15脚。读者可以根据自己的实际情况做相应的调整,无须与上述内容一模一样。
Copyright © 2015-2023 问渠网 辽ICP备15013245号