自制小四轴
本文作者:李德强
第六章 生成PWM信号
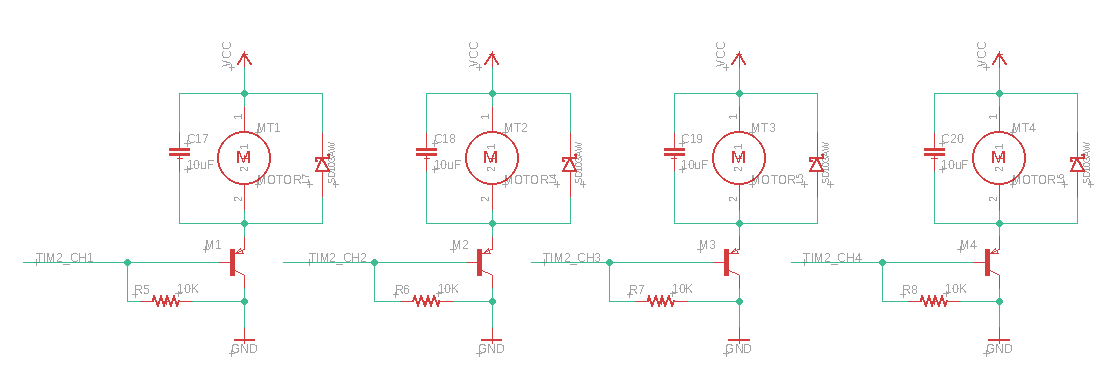
我们在电路设计时已经将TIM2的4路PWM作为4个电动机的驱动信号,我们再来回顾一下其电路图
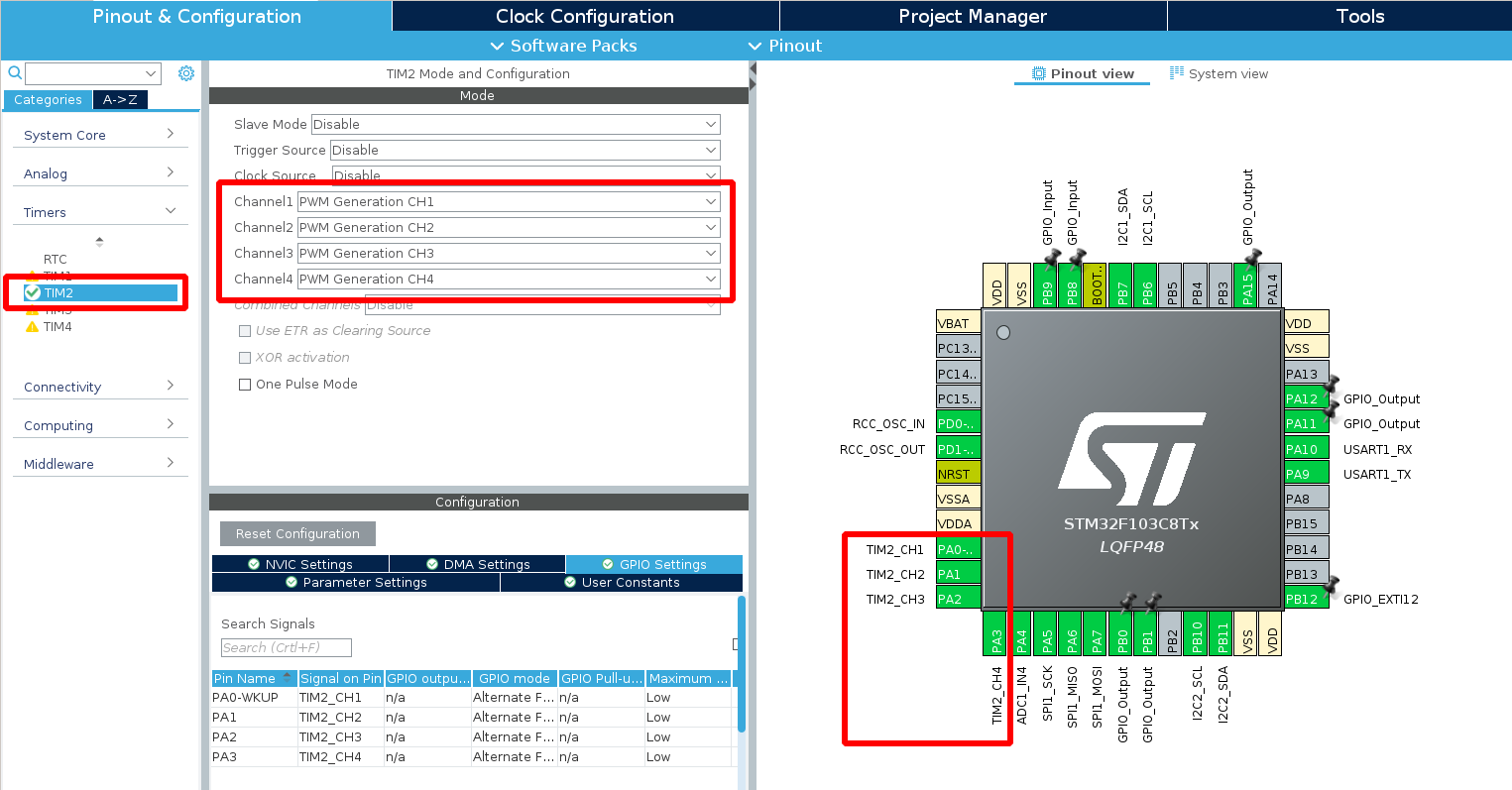
在CubeIDE中我们也对TIM2进行了配置
我们再来看看在工程中生成的代码内容:
void MX_TIM2_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = { 0 };
TIM_OC_InitTypeDef sConfigOC = { 0 };
htim2.Instance = TIM2;
htim2.Init.Prescaler = 72 - 1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 10000 - 1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 0);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, 0);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 0);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4, 0);
}
可以看到我们已经将TIM2的4路PWM设置完成了,我们只需要在指定的功能中加入PWM信号代码即可,也就是__HAL_TIM_SET_COMPARE()函数,我们可以指定其每一路PWM信号的占空比,它的范围是0~10000,这里是根据TIM2的周期配置而设置的。
最后,我们只需要在控制代码中指定需要生成的信号即可,我们可以将归一化的控制量转为0~10000之间的PWM信号,这也为我们对小四轴的控制系统做好了准备:
#define PWM_MIN (0)
#define PWM_MAX (10000)
void ctl_output(void)
{
for (int i = 0; i < 4; i++)
{
ctl_pwm[i] = ctl_motor[i] * (PWM_MAX - PWM_MIN) + PWM_MIN;
}
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, ctl_pwm[0]);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, ctl_pwm[1]);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, ctl_pwm[2]);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4, ctl_pwm[3]);
}
Copyright © 2015-2023 问渠网 辽ICP备15013245号