从晶元到人工智能
我们可以使用STM32来生成多路的PWM信号。首先我们来了解一下什么是PWM信号,PWM的全称为Pulse width modulation,即脉冲宽度调制,我们通常也称PWM信号为占空比信号。PWM信号包含3个主要属性:占空比、频率、振幅。

信号频率与周期:PWM信号频率F与周期T的关系为 F = 1 / F,也就是说频率和周期互为倒数。例如,我们有一个频率为400Hz的PWM信号,那么每一个PWM周期的时间为2500us。
占空比:就是PWM方波信号高电平占整个信号周期的比例。例如:PWM周期为2500us,而每一个高电平的时长为1000us,那么占空比为1000 / 2500 = 40%;
振幅:振幅就是高低电平差,也就是我们所说的高电平的电压,通常我们使用STM32单片机所产生的PWM信号为3.3V的PWM波,而有一些芯片和系统可能会产生5.0V或其它电压的PWM波。
例如,我们给出两个PWM信号的例子:

频率400Hz;周期2500us;占空比44%;

频率400Hz;周期2500us;占空比8%
注意,上图中给出的ms表示毫秒,us表示微秒(1毫秒等于1000微秒,1ms等于1000us)。
接下来,我们使用STM32F407来生产4路PWM信号,首先开启TIM4和GPIOD的时钟总线:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
然后,我们查看控制模块的原理图,找到需要生成PWM信号的4个引脚:
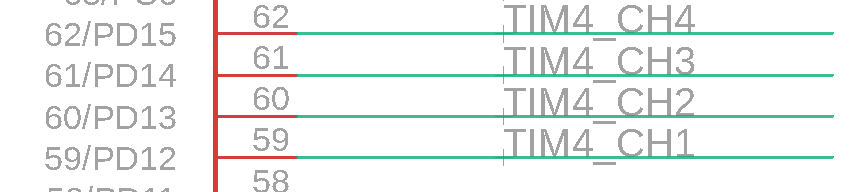
配置PD12、PD13、PD14、PD15这4个引脚,将它们配置为推挽输出模式:
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_Init(GPIOD, &GPIO_InitStructure);
由于我们使用的STM32F4xx系列,所以还需要打开这4个GPIO脚的AF的PinSource功能:
GPIO_PinAFConfig(GPIOD, GPIO_PinSource12, GPIO_AF_TIM4);
GPIO_PinAFConfig(GPIOD, GPIO_PinSource13, GPIO_AF_TIM4);
GPIO_PinAFConfig(GPIOD, GPIO_PinSource14, GPIO_AF_TIM4);
GPIO_PinAFConfig(GPIOD, GPIO_PinSource15, GPIO_AF_TIM4);
第三步,打开配置TIM4的时钟周期和PWM周期:
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler = 84 - 1; //配置预分频数
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseStructure.TIM_Period = 2500 - 1; //配置时钟周期
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
第四步,配置TIM4的各个PWM通道:
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM4, &TIM_OCInitStructure); //通道1
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OC2Init(TIM4, &TIM_OCInitStructure); //通道2
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //通道3
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //通道4
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable);
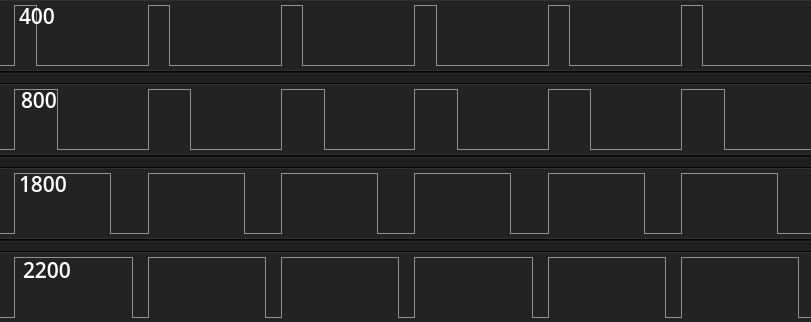
最后,分别配置4路PWM的占空比值,然后开启TIM4:
TIM_SetCompare1(TIM4, 400);
TIM_SetCompare2(TIM4, 800);
TIM_SetCompare3(TIM4, 1800);
TIM_SetCompare4(TIM4, 2200);
TIM_ARRPreloadConfig(TIM4, ENABLE);
TIM_Cmd(TIM4, ENABLE);
TIM_CtrlPWMOutputs(TIM4, ENABLE);
我们使用了TIM_SetCompare1/2/3/4()函数,将PD12、PD13、PD14和PD15分别设置高电平时长为400us、800us、1800us和2200us。我们将程序编译并烧录到我们的控制模块当中,然后使用示波器或逻辑分析仪来查看PWM的信号:
Copyright © 2015-2023 问渠网 辽ICP备15013245号