自制小四轴
从这一讲开始,我们将完成自制小四轴无人机的控制程序部分。也是我们所讲述的重点。我们制作的小四轴和遥控器都采用了STM32F103C8T6作为主控芯片,因此我们首先需要对其所相应的配置,使其能够满足我们的需要。值得一提的是我们可以使用官方所提供的IDE工具对STM32芯片进行配置并直接生成相应的代码,工具名为:STMicroelectronices STM32CubeIDE。这里我们使用的是V1.7.0版本。
一、创建配置工程
首先在CubeIDE中依次点击File -> New -> STM32 Project,在弹出来的对话框的NumPort中输入STM32F103C8,我们可以在其右下方看到对应的芯片属性,其共有48脚,Flash大小为64KB,RAM大小为20KB,最高主频为72MHz,如下图:

我们用鼠标选中这个芯片之后,点击Next按钮,在弹出来的对话框中输入项目名称MiniQuad,然后点击Finish按钮,如下图:

这样我们的芯片配置工程就完成了,CubeIDE工具会自动为我们生成相关内容,其工程文件在左侧导航中,如下图所示:

二、配置时钟频率
我们用鼠标双击QuadMini.ioc文件,会在CubeIDE右侧主窗口中显示芯片的配置选项。我们最先需要对其配置其工作频率,因此我们点击上方的Clock Configuration选项,如下图所示:

我们在前面的章节中已经讲述了其电路部分,我们采用了一个16Mhz的外部晶振来作为STM32的晶振源,所以我们需要在这里将芯片配置为外部16MHz晶振,并且希望让其工作在72MHz主频上,但此时我们可以看到HSE是不可使用的,所以我们需要在Pinout & Configuration选项卡中先配置一下RCC,依次点击Pinout & Configuration -> System Core -> RCC,然后再右侧出现的High Speed Clock(HSE)选项中将原来的Disabl修改为Crystal/Ceramic Resonator,如下图所示:

然后,我们再次回到Clock Configuration选项卡中,就会发现HSE处已经变为可修改状态了。于是我们在左侧HSE前面的Input frequency处将外部晶振频率修改为16MHz,在PLL Source Mux中将HSI修改为HSE,再在System Clock Mux中选中PLLCLK并在其后面的HCLK(MHz)中修改为72MHz,如下图所示:

这样我们的芯片时钟部分就配置完成了,我们可以点击保存按钮或使用Ctrl+S快捷键来保存此配置。 之后我们可以点击Project菜单下的Generate Code菜单或直接点击下面的图标来生成相应的源代码。如下图所示:

需要注意的是:自动生成的代码中我们可以任意加入或修改注释块中间的部分,也就是上图中红色箭头部分,如果我们修改了自动生成的代码部分,而如果我们之后再次修改配置并再次自动生成代码则会将这部分代码覆盖。
我们可以查看main.c文件中的SystemClock_config()函数,内容如下:
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV2;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
我们可以很清楚的看到代码中使用了RCC_HSE_ON和RCC_PLLSOURCE_HSE开启了外部晶振,使用了RCC_HSE_PREDIV_DIV2将16MHz除以2,得到8MHz的频率,再通过RCC_PLL_MUL9对8MHz乘以9得到72MHz的时钟工作主频。此处代码都是通过我们刚刚配置的内容自动生成的,不再赘述。
三、配置GPIO资源
接下来我们还需要针对芯片的GPIO进行相应的配置,我们可以将它们按功能简单的分为几类: 外部晶振、PWM输出、I2C通信、SPI通信、LED灯、调试串口、SWD烧录等。
1、外部晶振:使用GPIO5、6脚。可以直接在Pinout View中点击并选择(非必要)。
2、PWM输出:点击左侧Timers中的TIM2,然后再在右侧的Channel1~Channel4中分别将其配置为PWM Generation CH1 ~ PWM Generation CH4,如下图所示:

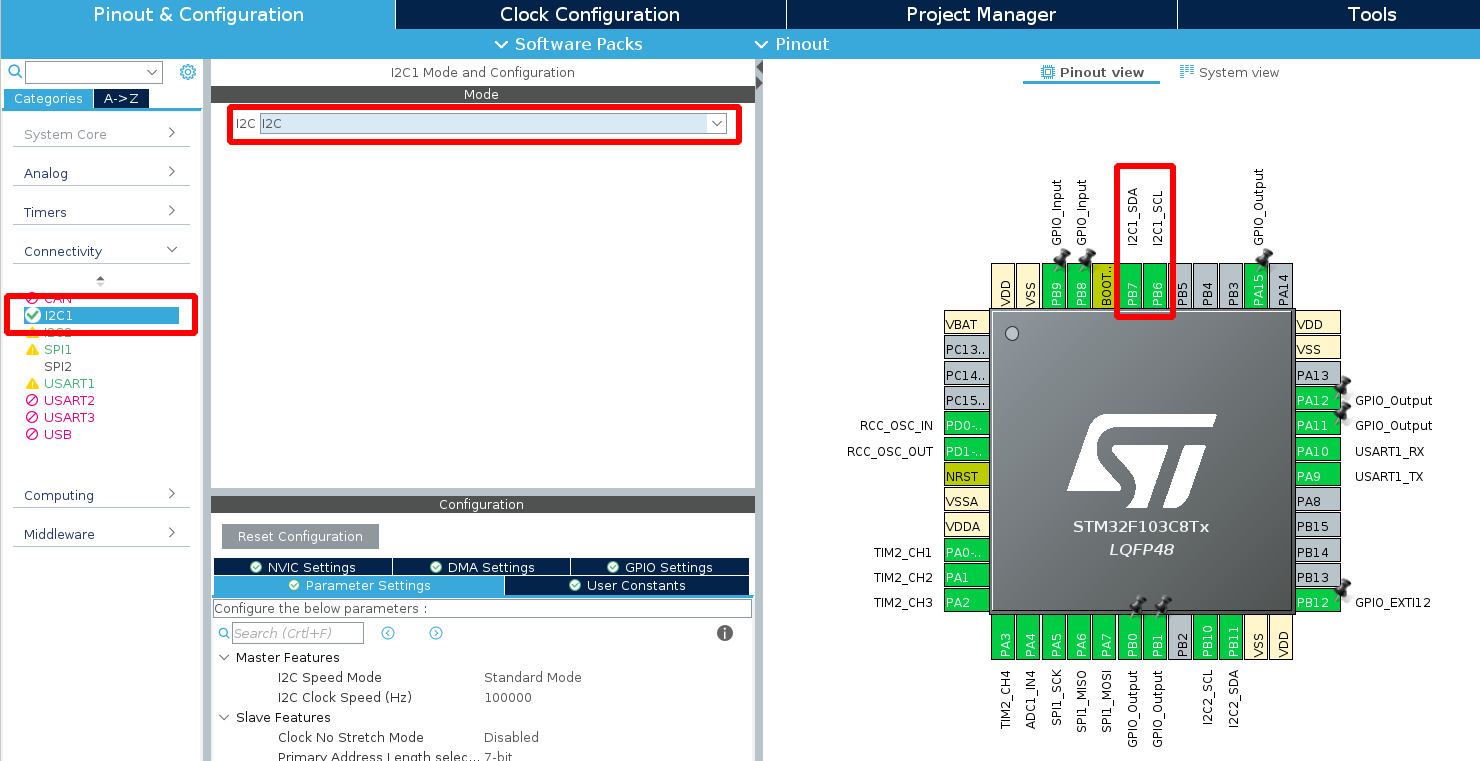
3、I2C通信:点击左侧Connectivity中的I2C1并在右侧的I2C中将Disable修改为I2C,如下图所示:
4、SPI通信:在Connectivity中点击SPI1并在右侧Mode中将Disable修改为Full-Duplex Master,即全双工SPI主设备,Pinout View中即可看到PA5、PA6和PA7已经变为SPI1_SCK、SPI1_MISO和SPI1_MOSI了,如下图所示:

关于SPI还有一点需要说明的,就是我们使用SPI接入NRF24L01通信模块,除了使用SPI的3个基本功能脚SPI1_SCK、SPI1_MISO、SPI1_MOSI之外,还需要一个使能脚PB0、一个片选脚PB1、一个外部中断脚PB12。读者们可以参考其电路原理图:

5、LED灯:在Pinout View中直接点击PA11、PA12、PA15将其设置为GPIO的Output输出模式(请读者参数电路原理图):

6、按键功能:在Pinout View中直接点击PB8、PB9将其设置为GPIO的Input输入模式(请读者参数电路原理图):

7、调试串口:在Connectivity中点击USART1并在右侧Mode中将Disable修改为Asynchronous,Pinout View中即可看到PA9和PA10已经变为USART1_TX和USART1_RX了,如下图:

8、SWD烧录:使用PA13和PA14脚作为烧录功能脚,不需要单独配置。
做完全部配置之后,再次点击保存按钮或使用Ctrl+S快捷键来保存这些配置。 之后点击Project菜单下的Generate Code菜单或直接点击下面的图标来生成相应的源代码。生成代码之后我们可以在工程文件中查看这些源代码:
static void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Common config
*/
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_4;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
/**
* @brief I2C2 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C2_Init(void)
{
/* USER CODE BEGIN I2C2_Init 0 */
/* USER CODE END I2C2_Init 0 */
/* USER CODE BEGIN I2C2_Init 1 */
/* USER CODE END I2C2_Init 1 */
hi2c2.Instance = I2C2;
hi2c2.Init.ClockSpeed = 100000;
hi2c2.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c2.Init.OwnAddress1 = 0;
hi2c2.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c2.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c2.Init.OwnAddress2 = 0;
hi2c2.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c2.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C2_Init 2 */
/* USER CODE END I2C2_Init 2 */
}
/**
* @brief SPI1 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI1_Init(void)
{
/* USER CODE BEGIN SPI1_Init 0 */
/* USER CODE END SPI1_Init 0 */
/* USER CODE BEGIN SPI1_Init 1 */
/* USER CODE END SPI1_Init 1 */
/* SPI1 parameter configuration*/
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI1_Init 2 */
/* USER CODE END SPI1_Init 2 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 64-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 10000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_15, GPIO_PIN_RESET);
/*Configure GPIO pins : PB0 PB1 */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : PA11 PA12 PA15 */
GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : PB8 PB9 */
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
这些代码都是CubeIDE工具自动生成的,也就是根据我们在IDE界面中的图形配置生成的代码配置,无须赘述。
Copyright © 2015-2023 问渠网 辽ICP备15013245号